

Cette loi se déduit facilement de la notion de courant électrique. Supposons que l'on ait un flux i0=dq1/dt d'électrons dans un conducteur arrivant à un "embranchement" d'un circuit électrique :

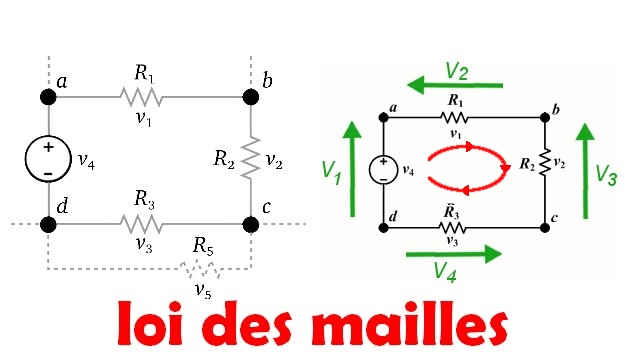
Dans la théorie des réseaux de Kirchhoff, un noeud est un point de convergence de plusieurs conducteurs.
Plus généralement, si on considère n conducteurs arrivant au même point O, avec les sens positifs des courants in définis comme suit, vers O...



















 Figure
1 : Le prototype monté. Le bus raccordé au module d’affichage peut
également être relié à un circuit à relais pouvant commander jusqu’à 40
canaux ! (Ce circuit sera décrit prochainement).
Figure
1 : Le prototype monté. Le bus raccordé au module d’affichage peut
également être relié à un circuit à relais pouvant commander jusqu’à 40
canaux ! (Ce circuit sera décrit prochainement). Figure 2: Schéma de la carte principale du circuit de commande vocale.
Figure 2: Schéma de la carte principale du circuit de commande vocale. Figure 3 : Brochage et fonctions de la mémoire 8 k x 8 SRAM utilisée dans cette réalisation.
Figure 3 : Brochage et fonctions de la mémoire 8 k x 8 SRAM utilisée dans cette réalisation. Figure 4 : Schéma de la carte d’affichage du circuit de commande vocale.
Figure 4 : Schéma de la carte d’affichage du circuit de commande vocale. Figure 5a : Vue sur le microprocesseur HM 2007 et sa mémoire SRAM.
Figure 5a : Vue sur le microprocesseur HM 2007 et sa mémoire SRAM. Figure 5b : Brochage du HM2007.
Figure 5b : Brochage du HM2007. Figure 5c : Tableau des fonctions des broches du HM2007.
Figure 5c : Tableau des fonctions des broches du HM2007. Figure 6 : Schéma d’implantation des composants de la carte principale du circuit de commande vocale.
Figure 6 : Schéma d’implantation des composants de la carte principale du circuit de commande vocale. Figure 7: Photo de la carte principale. Les composants de cette carte sont montés sur un circuit imprimé double face.
Figure 7: Photo de la carte principale. Les composants de cette carte sont montés sur un circuit imprimé double face. Figure 8a : Dessin du circuit imprimé à l’échelle 1 de la face soudures du circuit principal de commande vocale.
Figure 8a : Dessin du circuit imprimé à l’échelle 1 de la face soudures du circuit principal de commande vocale. Figure
8b : Dessin du circuit imprimé à l’échelle 1 de la face composants. Si
vous réalisez le circuit imprimé vous-même, les pastilles devront toutes
être en liaison avec la face opposée, soit en soudant le composant qui
les traverse des deux côtés, soit par un petit morceau de chute de queue
de résistance.
Figure
8b : Dessin du circuit imprimé à l’échelle 1 de la face composants. Si
vous réalisez le circuit imprimé vous-même, les pastilles devront toutes
être en liaison avec la face opposée, soit en soudant le composant qui
les traverse des deux côtés, soit par un petit morceau de chute de queue
de résistance. Figure 9 : Schéma d’implantation des composants de la carte d’affichage du circuit de commande vocale.
Figure 9 : Schéma d’implantation des composants de la carte d’affichage du circuit de commande vocale. Figure 10 : Le circuit d’affichage terminé.
Figure 10 : Le circuit d’affichage terminé. Figure 11 : Dessin du circuit imprimé à l’échelle 1 de la carte d’affichage.
Figure 11 : Dessin du circuit imprimé à l’échelle 1 de la carte d’affichage. Figure 12 : Le système de reconnaissance prêt à fonctionner, avec son affichage, son micro et son clavier.
Figure 12 : Le système de reconnaissance prêt à fonctionner, avec son affichage, son micro et son clavier. Figure 13a : Schéma électrique d’une interface simple 10 sorties basée sur un 4028.
Figure 13a : Schéma électrique d’une interface simple 10 sorties basée sur un 4028. Figure 13b : Table de vérité du convertisseur BCD-décimal CD4028.
Figure 13b : Table de vérité du convertisseur BCD-décimal CD4028. Figure 13c : Schéma synoptique interne et brochage du latch 74HC373 ou 74LS373.
Figure 13c : Schéma synoptique interne et brochage du latch 74HC373 ou 74LS373. Figure 13d : Table de vérité du latch 74HC373 ou 74LS373.
Figure 13d : Table de vérité du latch 74HC373 ou 74LS373.















{kind=link}